
Bands, Lateinformationen, Theater, Künstlerischer Tanz, Filmbeiträge, Turnvorführungen, Umweltquiz, Gesang, Orchester, Kunstführungen, und kulinarisches Fingerfood,…


Wir sind eine lebendige und kreative Schule. Unser Ziel ist es, unsere Schülerinnen und Schüler auf ihrem Weg zur Entfaltung einer souveränen Persönlichkeit bestmöglich zu begleiten.
Nehmen Sie sich ein paar Minuten Zeit und klicken Sie durch unsere Homepage, um unser CJT näher kennenzulernen.
Im Namen unseres Schulleitungsteams
Wolf Kraus
(Schulleiter)
Sehr geehrte, liebe Eltern der 4. Klassen,
wir freuen uns sehr, dass Sie Ihr Kind an unserem CJT-Gymnasium anmelden möchten.
Ab dem 2. Mai 2024 (Ausgabe der Übertrittszeugnisse) finden Sie an dieser Stelle alle Informationen zu der Online-Anmeldung und den übrigen Anmeldeunterlagen.
Sie können uns Ihre Unterlagen auf dem Postweg zusenden, an dem Haupteingang der Schule in den Briefkasten einwerfen oder auch gerne persönlich vorbeibringen. Das Sekretariat ist hierfür vom 6. - 8. Mai jeweils von 8.00 bis 15.00 Uhr für Sie da.
Auch die Anmeldung zum Probeunterricht erfolgt bis zum 8. Mai auf diesem Wege. Der Probeunterricht findet vom 14. bis zum 16. Mai statt.
Weitere Informationen zum Probeunterricht mit Übungsaufgaben finden Sie unter diesem Link.
Sollten Sie eine Beratung wünschen, sind wir telefonisch (09123-94288-0) oder auf Wunsch auch persönlich für Sie da.


Bands, Lateinformationen, Theater, Künstlerischer Tanz, Filmbeiträge, Turnvorführungen, Umweltquiz, Gesang, Orchester, Kunstführungen, und kulinarisches Fingerfood, Leidenschaft und gute Laune …
Ihr wart großartig! Es war ein grandioser Abend!
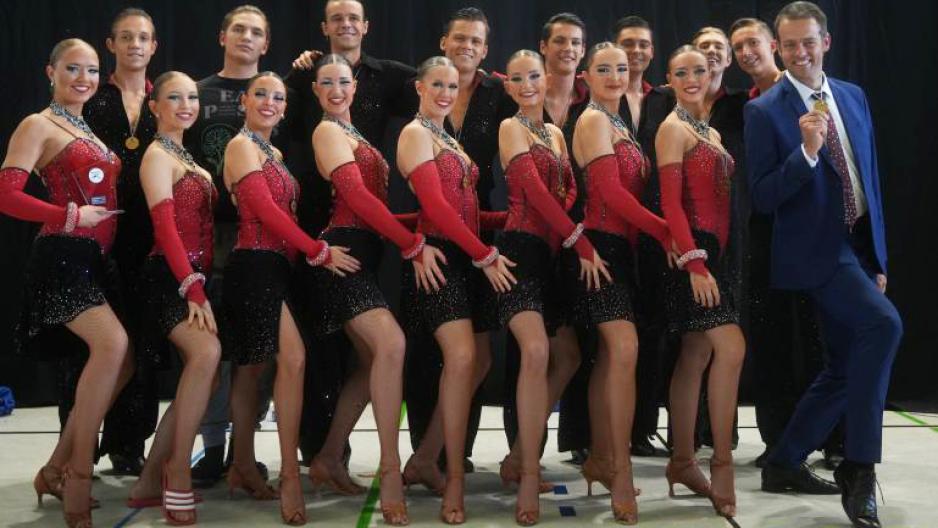
Die Lateinformation des Christoph-Jacob-treu-Gymnasium (A-Team) hat erfolgreich ihren Titel als bayerischer Landessieger verteidigt. Am 11.04.

Das fragten sich die sechsten Klassen, als Jörg Kabierske, Experte in Sachen Medienkompetenz von klicksalat.de, Ende Februar das Klassenzimmer betrat. Der Vortrag über die Sicherheit im Internet fand für alle 6. Klassen an zwei aufeinanderfolgenden Tagen statt.
Bands, Lateinformationen, Theater, Künstlerischer Tanz, Filmbeiträge, Turnvorführungen, Umweltquiz, Gesang, Orchester, Kunstführungen, und kulinarisches Fingerfood,…
Die Lateinformation des Christoph-Jacob-treu-Gymnasium (A-Team) hat erfolgreich ihren Titel als bayerischer Landessieger verteidigt. Am 11.04. konnte…
Das fragten sich die sechsten Klassen, als Jörg Kabierske, Experte in Sachen Medienkompetenz von klicksalat.de, Ende Februar das Klassenzimmer betrat…

Täglich machen sich tausende Schülerinnen und Schüler auf den Weg zur Schule, viele von ihnen mit Bus und Bahn. Doch wie sicher ist man heutzutage in…

Die Klasse 10a hat (mit drei anderen bayerischen Schulen) im Bayerischen Landtag am ganztägigen Planspiel "Der Landtag sind wir" teilgenommen.
Der…

Zehn Schülerinnen und Schüler des Christoph-Jacob-Treu-Gymnasiums verbrachten zwei erlebnisreiche Tage Landesfinale Ski Alpin der Bayerischen Schulen…

Erstmalig nahmen Schülerinnen gleich in zwei Altersklassen am Bezirksfinale Tanz in der Sparte Künstlerischer Tanz teil.
Mit…

Als "Schule ohne Rassismus und mit Courage" stehen wir zu unseren Werten!

Ein Gespräch mit einer Bundestagsabgeordneten und mit einem EU-Parlamentsabgeordneten, eine Akademie in Westberlin als Unterkunft, 50 Jugendliche aus…

Wer kennt es nicht, das Gefühl, einen Film oder ein Theaterstück zu sehen und innerhalb kürzester Zeit zu erkennen, ob sich der Weg dorthin gelohnt…
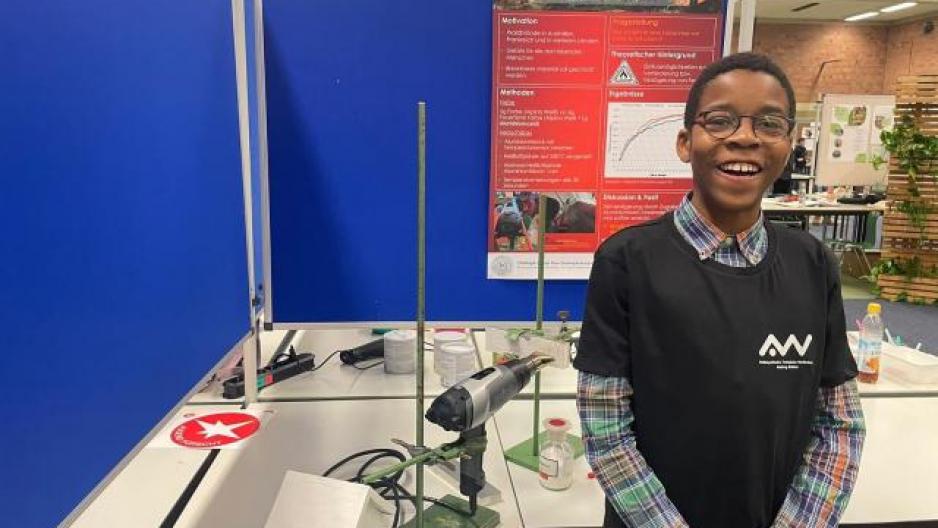
Beim diesjährigen Regionalwettbewerb von Jugend forscht konnte das CJT-Gymnasium an der OTH in Amberg gleich mit drei beeindruckenden Projekten überzeugen und sich somit…

Zur diesjährigen Battle trafen sich 15 Schulen aus näherer und fernerer Umgebung (z. B. aus Coburg und Schweinfurt), und auch das CJT-Gymnasium war…

Ein Eingangstor, ein großer Platz, ein paar Gebäude – man könnte überall und nirgends sein, gäbe es nicht am Rande, doch irgendwie mittig des Platzes…

900 Gäste, 4 Bands, DJ-Crew, Fotobox - drei Tage schweißtreibender Auf- und Abbau - es hat sich gelohnt.
Der AKV unter neuer Leitung, Förderverein und Elternbeirat,…

In "The Dark Lord and the White Witch" will der furchtbare Lord Morbus die Herrschaft über das Land Underearth erringen, um es mit seinen…

Was bedeutet der Angriff Russlands auf die Ukraine für Deutschland? Welche Folgen hatte und hat der Angriff für die Ukraine und die Sicherheit…

Die Schulmannschaften des Christoph-Jacob-Treu-Gymnasiums Lauf holten beim Mittelfränkischen Finale am Silbersattel in Steinach (Thüringen) dreimal…

Die Mädchen und Jungen der Handball-Schulmannschaften des Laufer Gymnasiums spielen sehr erfolgreich im Landkreis und auch in Mittelfranken.
…

Insgesamt neun Schülerinnen und Schüler des Christoph-Jacob-Treu-Gymnasiums Lauf wurden für ihre erfolgreiche Teilnahme bei Mathematikwettbewerben…

Unter der Federführung der Fachschaft Musik wartete das CJT auch in diesem Jahr mit einer Premiere auf. Waren es im letzten Jahr ukrainische Chöre,…

Am Dienstag, den 19. Dezember 2023, fand nach einem Jahr endlich wieder der schulinterne Englisch-Lesewettbewerb der 7. Klassen statt. So durften die…

Seit 1993 packen Tausende Kindergartenkinder, Schülerinnen und Schüler, Mitarbeitende von Unternehmen und viele andere Menschen in der…

Schülerinnen und Schüler des CJT-Gymnasiums im Gespräch mit ARD-Korrespondent Mike Lingenfelser
Wie kommen ARD-Korrespondenten an ihre…

Am 6.12.23 war es wieder einmal so weit. Der Nikolaus mit seinen Engeln hat unsere Fünftklässler besucht. Schon in der ersten Pause des Nikolaustags…

Während vor dem Fenster leise der Schnee rieselte, herrschte Aufregung im Klassenzimmer DE03, dem Ort des diesjährigen Vorlesewettbewerbs. Alle…

Wir begrüßen unsere italienischen AustauschschülerInnen vom Liceo Scientifico Nicolò Copernico aus Prato, Italien, und wünschen ihnen eine ereignisreiche Woche mit Schnee,…

Seit ein paar Jahren nimmt das CJT-Gymnasium jährlich für drei Wochen am Wettbewerb „Schulradeln“ teil.
Diesmal haben wir dabei im Juli den 2.…

Am 26. Oktober 2023 besuchten mehrere 10. Klassen unserer Schule eine Lesung in der Stadtbücherei Lauf.
Der Autor Karl Olsberg stellte sein am…

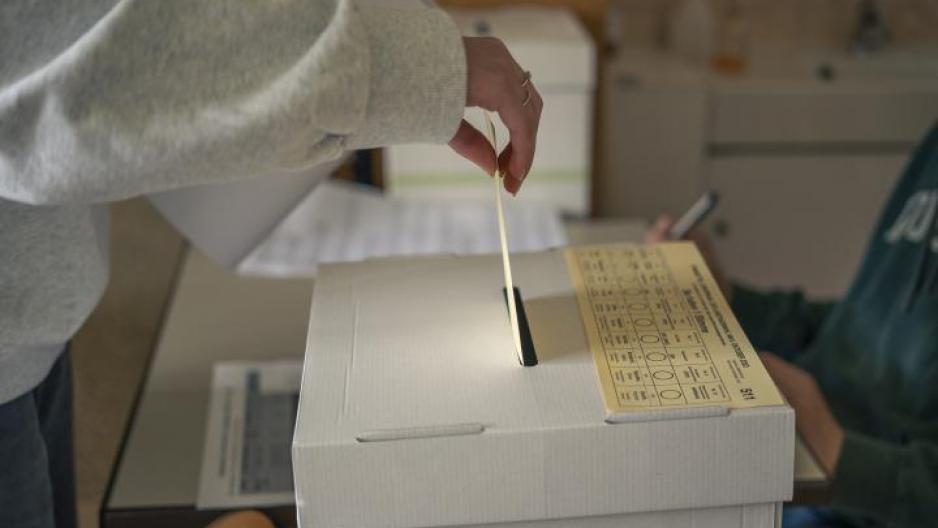
Die politischen Zeiten scheinen momentan besonders unsicher, beängstigend und verwirrend. Umso besser, dass wir, der Wahlkurs Politik und…

Als Botschafterschule des Europäischen Parlaments durften die Schülerinnen und Schüler des CJTs im Zuge der Doku-Live Veranstaltung, Ingo Espenschied…
Soweit sind wir in Bayern zwar noch nicht, aber am CJT konnten alle Schülerinnen und Schüler der Jahrgangsstufen 10, 11, Q11 und Q12 an der…

Im Zuge des Projekttags des CJT am 5. Oktober 2023 besuchte eine Auswahl von Schülerinnen und Schülern aus der 10. Jahrgangsstufe den „Lernort…

Wer kennt es nicht – man stellt sich eine Frage. Man nimmt sein Handy heraus. Man geht ins Internet. Man klickt auf eine Seite…und da ist es: Cookies…

Unter der der Leitung von Herrn Denca und Begleitung von Frau Hausmann startete der Schüleraustausch am 14.09.2023 am Bahnhof in Lauf rechts. 23…

Die 7C des CJT-Gymnasiums macht bei der Fernsehsendung „Die beste Klasse Deutschlands“ auf KiKA mit. Ausstrahlung ist am Freitag, 15.09.2023 um 19.30…
Das Pfand-Sammeln am CJT geht weiter: Dank der fleißigen Mitarbeiterinnen des AK Pfandspende können wir vor den Sommerferien noch einmal 35 Euro (das entspricht 175…

„Ich möchte eine Zuckerwatte,“ sagt ein Kind und hat damit Probleme – eigentlich, denn am Sommerfest des CJT bleiben keine Wünsche unerfüllt. Es gibt…

Am Donnerstag, den 20. Juli 2023, durften Schülerinnen und Schüler im Rahmen des Projekts „Wissenschaft macht Schule“ an einer Betriebsbesichtigung…

Ein Blick über die Schulter, weiche Knie, das Herz steigt in ihren Hals – nachts, in einer Seitengasse in San Francisco ist Lily Hu im Begriff, eine…

Im Rahmen des Projekts „Wissenschaft macht Schule“ fand am 10.7.2023, in Begleitung von Frau Vogel eine Betriebsbesichtigung beim ZWL statt.
…

Fachkräftemangel, fehlender Nachwuchs im MINT-Bereich und Genderungleichgewichte. Diese und ähnliche Schlagworte finden sich immer wieder in den Schlagzeilen. Anstatt die…

Die fränkische Literatur- und Poetry-Slam-Szene darf sich auf starken Nachwuchs gefasst machen. Die Teilnehmerinnen des Wahlfachs Kreatives Schreiben am Laufer CJT-Gymnasium…

Das Christoph-Jacob-Treu-Gymnasium Lauf lädt herzlich ein zum CJT-Ehemaligentreffen 2023, am Freitag, 21. Juli um 19:00 Uhr auf dem Schulhof des Gymnasiums in der Hardtstraße…

17 Klassen haben im Landkreis Nürnberger Land wieder am Europäischen Nichtraucherwettbewerb „Be smart- don’t start“ teilgenommen und dabei miteinander entschieden, vom 14.11.…

Ich nahm voller Neugier und Spannung Platz und wartete gespannt auf den außergewöhnlichen Vortrag von Mario Röllig, einem Zeitzeugen der DDR, an dem ich am 5.7.2023 teilnehmen…

Steht die Sonne am Horizont oder regnet es am Tag der Tage? Feiern wir drinnen oder geht es draußen? Alljährlich stellen sich den Abiturientinnen und Abiturienten dieselben…

Im Laufe des aktuellen Schuljahres ermöglichte der Förderverein des Christoph-Jacob-Treu Gymnasiums Lauf etliche Anschaffungen, die dem Sportunterricht und den Wahlfächern aus…

Die RSG schreibt seit 2007 am CJT Geschichte. Mit zahlreichen Teilnahmen an Bezirks- und Landesfinalen wurde die Sportart mit Handgeräten: Ball/ Seil/ Reifen/Keulen auch an…

Durch den Sieg beim Landesfinale Bayern am 19.04. in Lauf hatte sich die Lateinformation des CJT-Gymnasiums für den Bundeswettbewerb der…

„Wenn die Engel reisen, dann scheint die Sonne“, mit diesen Worten begrüßte Schulleiter Wolf Kraus die polnischen Schülerinnen und Schüler am Montagmorgen bei tollem Wetter am…

Jedes Jahr freut sich die Natur und Technik Fachschaft über die rege Teilnahme am Wettbewerb „Experimente antworten“.
Hier die aktuellen Teilnehmer der 2. Aufgabenrunde,…

„Auf der Suche nach …“
ANKUNFT
Die diesjährige Fahrt ausgewählter Schülerinnen und Schüler der neunten Klassen nach Ipsheim auf die Burg Hoheneck war ein großer…

Eine ganze Museumsausstellung zu Brot und Spielen? Genau das fragten sich ziemlich viele Schüler:innen der Klasse 6a des CJT Gymnasiums, als sie von der Exkursion hörten, die…

Das CJT-Gymnasium veranstaltete einen Hackathon für die Robotikschulen aus der Region.
50 Schülerinnen und Schüler…

Das Judentum: Volk, Religion oder Weltverschwörung?
Um diese Frage ging es in der Präsentation von Dr. Dr. Doru Doroftei im Rahmen der Reihe „Wissenschaft macht Schule“…

Bereits zum fünften Mal war das White Horse Theatre zu Gast an unserer Schule.
Die 6. Klassen begaben sich in dem Stück „The Green Knight“ zusammen mit Sir Gawain von…

